低代码轴回零保护
在使用低代码系统进行轴单轴回零或者全部回零时,需要考虑是否会出现轴回零运动时机械动作干涉导致轴撞机的情况,可以通过设置轴回零保护防止轴撞机。轴回零保护设置分为两种:一种是轴回零时先后顺序保护;一种是轴回零前条件限制保护,是否允许回零。
一、轴回零时顺序保护
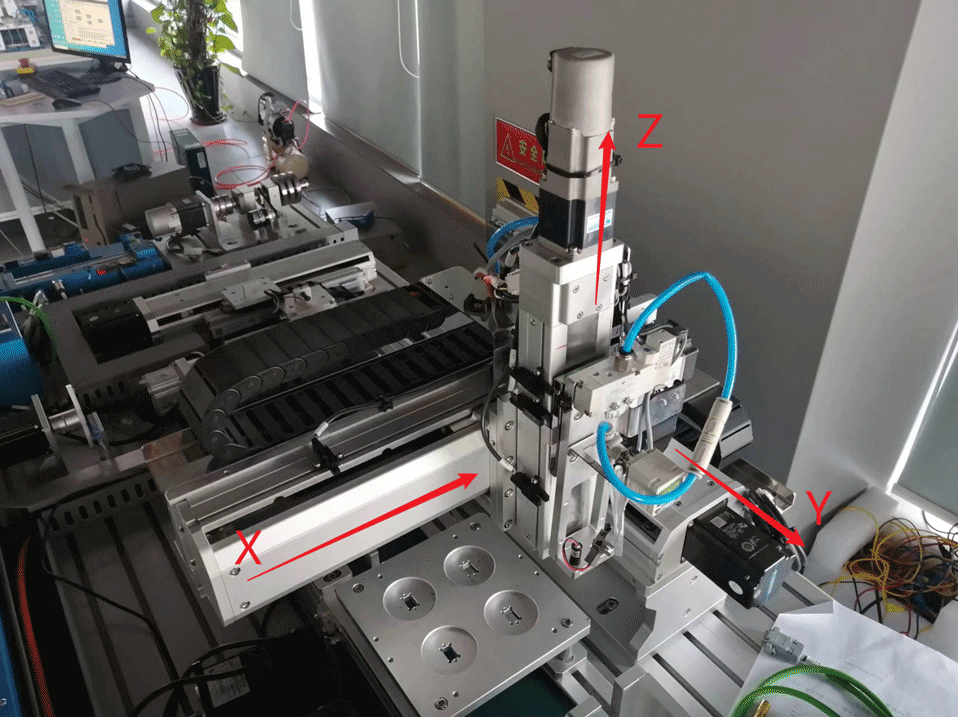
根据现场轴实际安装情况判断轴全部回零时的先后顺序,如下图1所示,1+X设备有X、Y、Z三个轴。通过三轴运动分析得知,X、Y轴相互之间回零运动时不会受干涉影响撞机,但两者都会受Z轴回零运动时干涉影响撞机,所以X、Y、Z三轴全部回零时,必须保证Z轴先回到零点位置,X、Y轴再回到零点位置。
根据实际轴在回零时的先后回零顺序,在利用Janus平台配置低代码系统轴参数配置时,可以设置X\Y\Z三轴的回零顺序,如下图2所示:
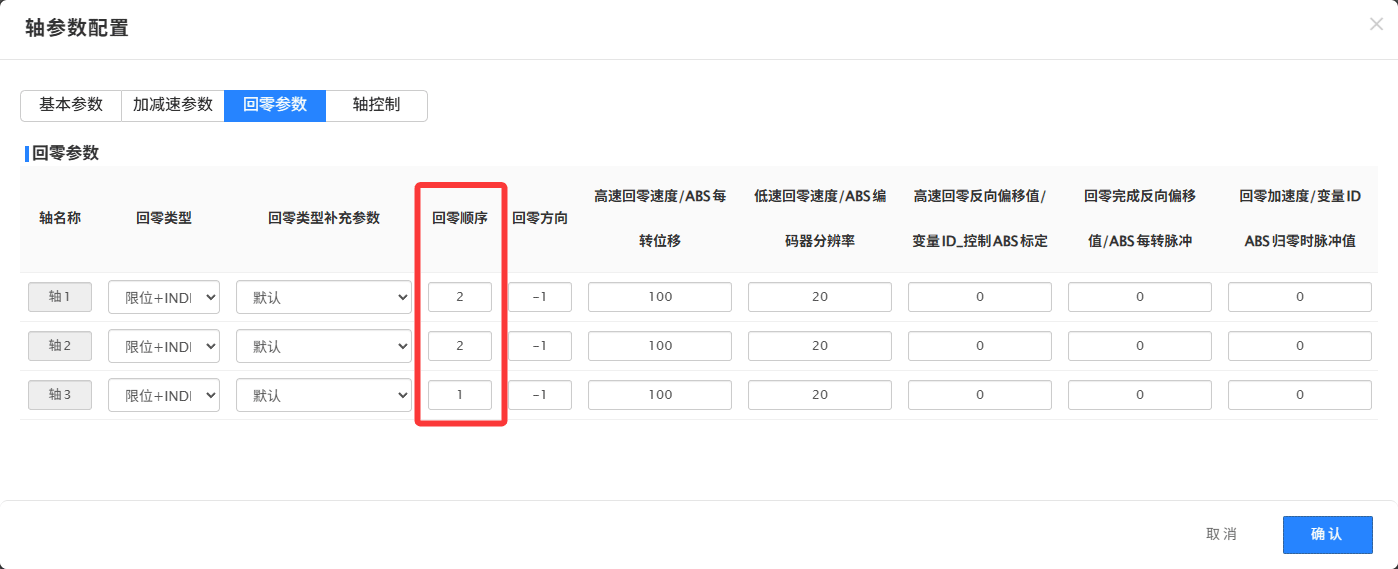
如上图2所示,Z轴回零顺序参数设置为1,表示轴全部回零时,Z轴先回到零点位置,X\Y轴回零顺序参数设置为2,表示轴全部回零时,Z轴回到零点位置之后,X\Y轴才可以同时回到零点位置。注意:轴全部回零时的先后顺序,根据设置的参数大小排序。
二、轴回零前条件限制保护
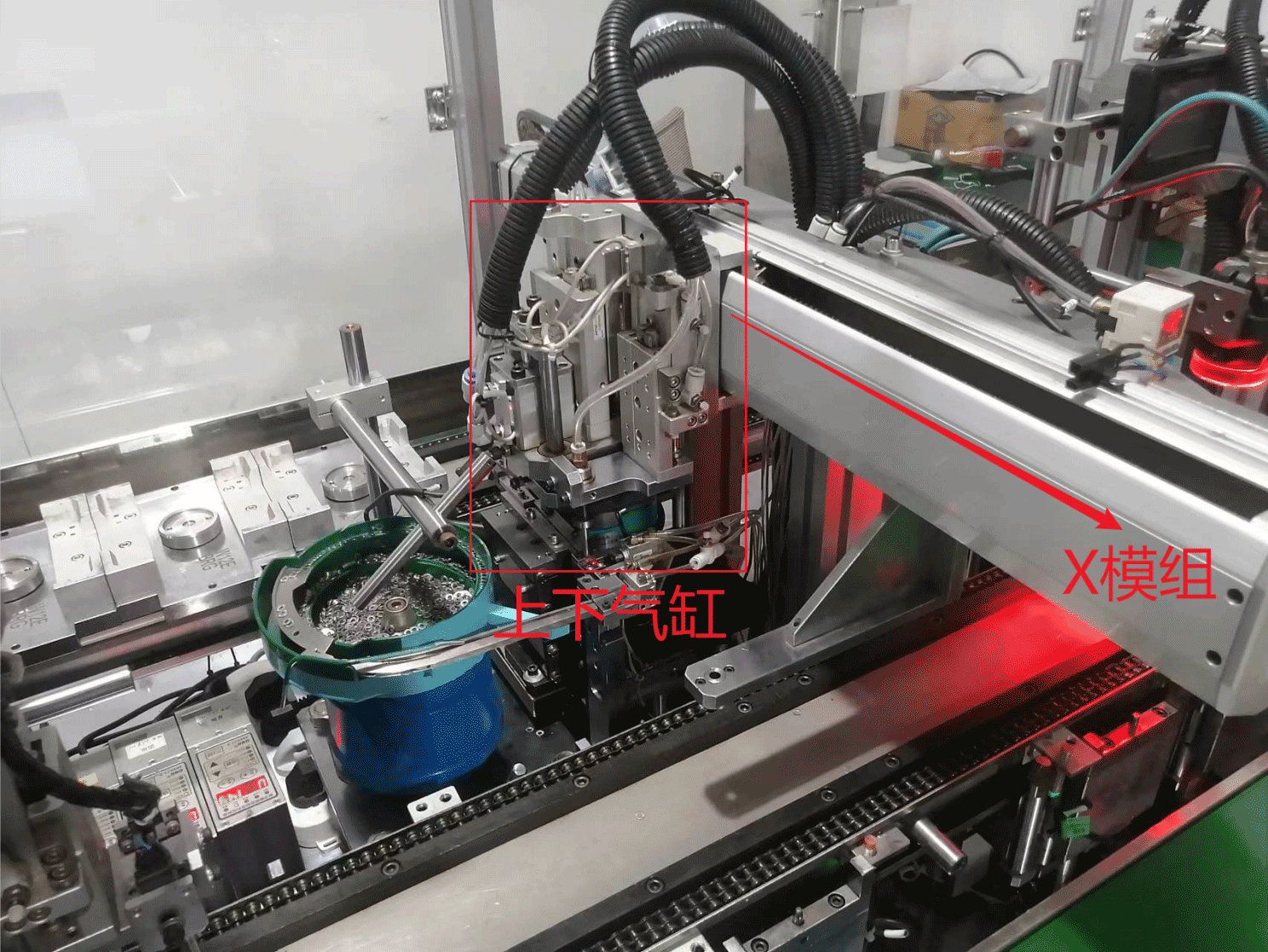
根据现场轴实际安装情况判断轴回零时是否会受其它机械干涉导致轴回零运动时撞机添加轴回零前条件限制保护,如下图3所示,X模组回零时,如果气缸处于下面的动点位置,会导致气缸撞机损坏设备,所以必须保证气缸处于上面的原点位置,才可以启动X模组回零。
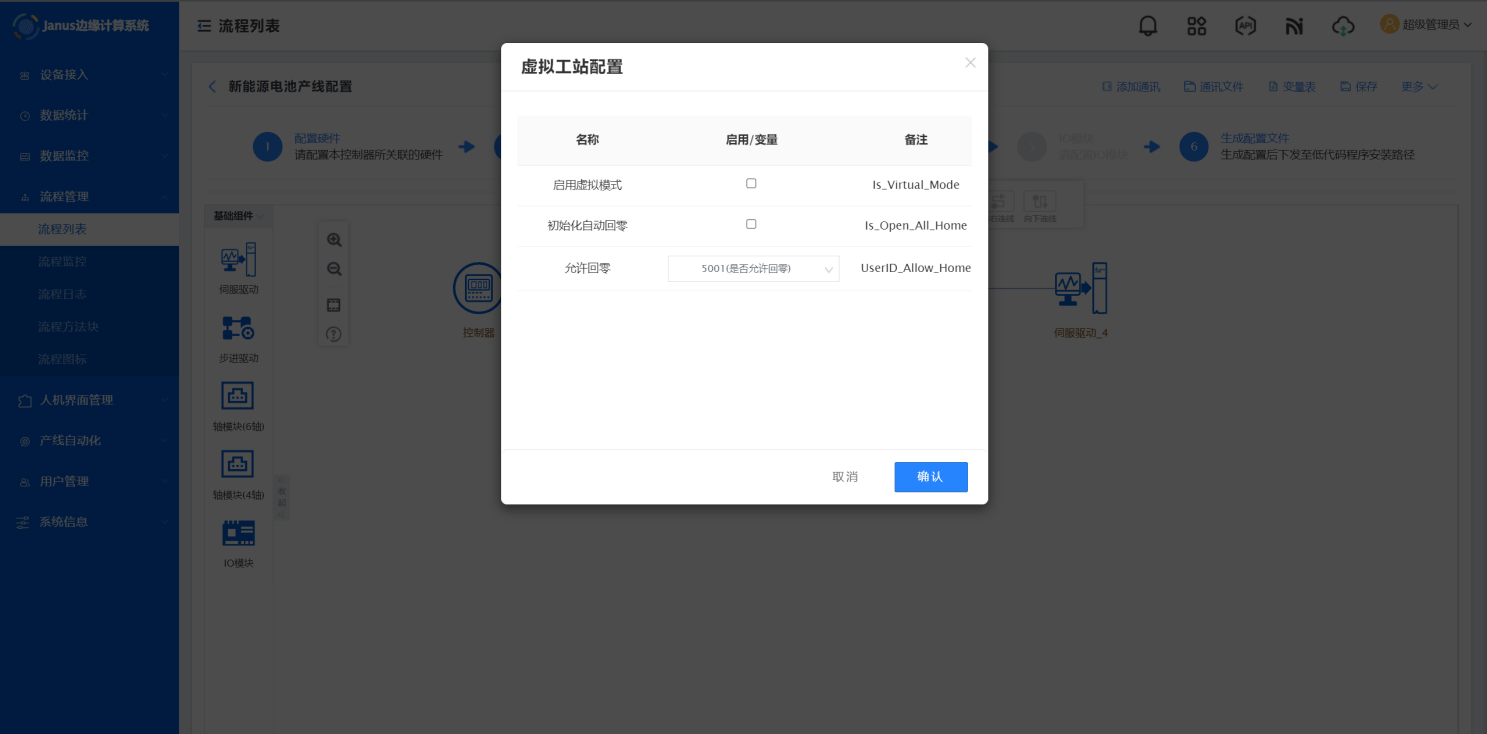
根据轴回零前的相关限制条件,在利用Janus平台配置低代码系统轴参数配置文件时,可以在控制器资源配置-更多-虚拟工站配置里设置回零启动前控制变量,判断是否允许轴启动回零,如下图4所示,当变量5001的值为1时,允许轴启动回零,当变量5001的值为0时,不允许轴启动回零。
:::info 注意
在虚拟工站配置里配置允许回零变量完成时,需要重新生成配置,在配置文件列表里下发配置到低代码控制系统,下发配置成功之后,需要重启低代码系统方可生效使用,允许回零功能是低代码的配置文件是Ctrl_Mtn.txt配置文件里的功能之一,路径是D:\Ftp\EasyAutoSystem\System\ParaFiles\Ctrl.Mtn,txt
:::
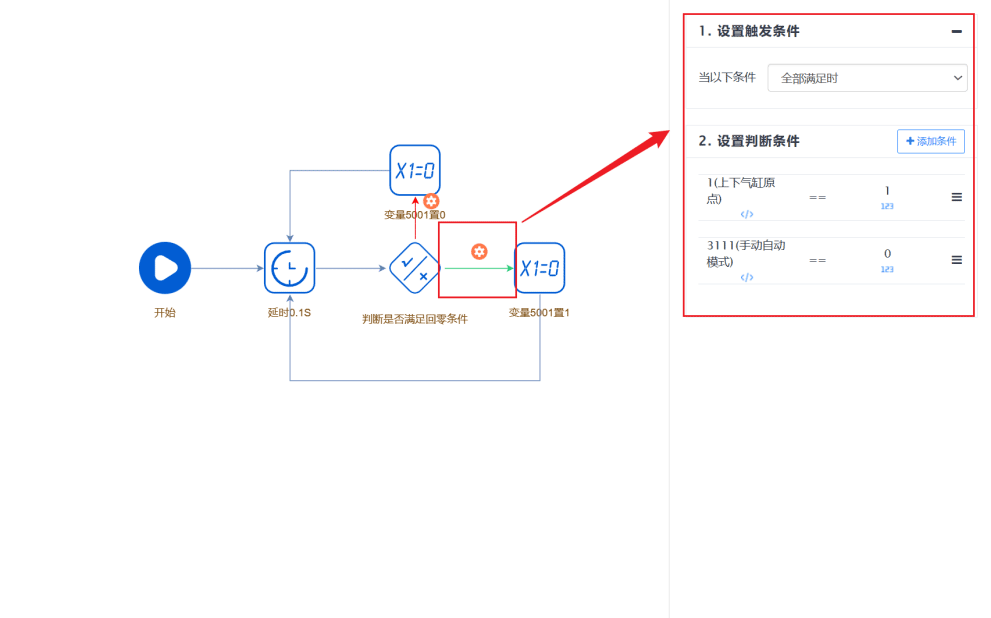
如上图4所示,变量5001的值可以通过设计低代码自启动流程来控制,假设X模组允许回零时的启动条件是上下气缸必须处于上面的原点位置,而且低代码系统模式必须处于手动模式。控制回零流程逻辑设计如下图5所示:(上下气缸原点DI对应的低代码变量为1,上下气缸动点DI对应的低代码变量为2,低代码系统模式设置对应的变量为3111,当3111==1时,系统处于自动模式,当3111==0时,系统处于手动模式)。
:::info 注意 图47控制回零流程在下发配置到控制时需要勾选设置为自启动流程,确保流程在实时运行刷新,如下图6所示。
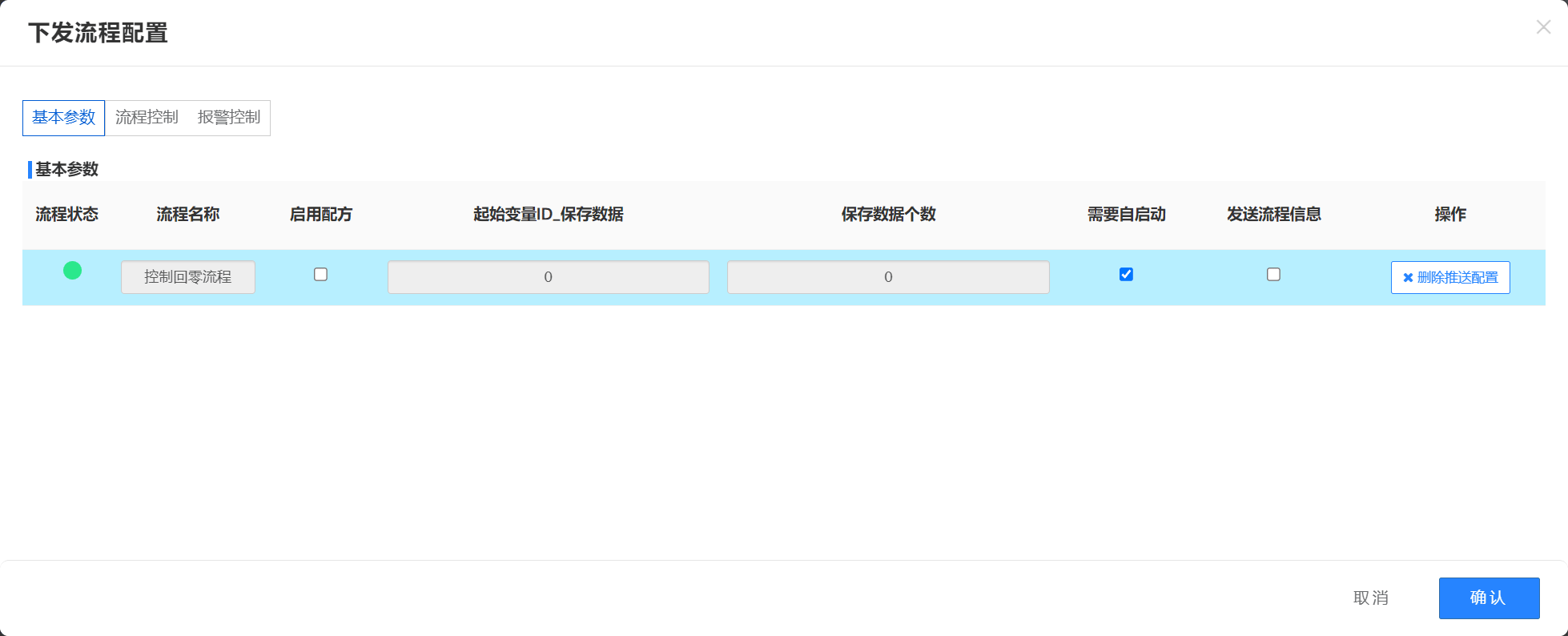
:::