低代码调试助手
主要是介绍在利用Janus边缘计算系统配置完成控制器硬件资源(包括控制器资源、轴资源、IO资源)并且生成配置文件下发到低代码控制系统之后,如何使用低代码调试助手测试各轴参数是否配置正确以及查看各轴的轴状态、测试IO参数是否配置正确以及查看IO的状态等等。
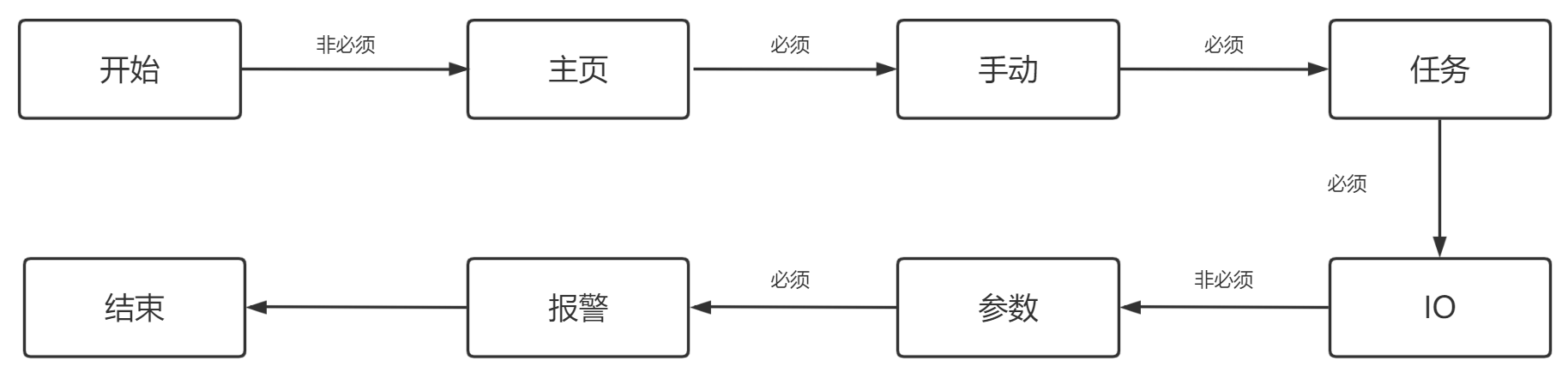
低代码调试助手的使用流程如下图所示:
准备工作
在使用低代码调试助手之前,请先准备好以下内容:
- Janus边缘计算系统,一套。本公司会在控制器上安装边缘计算系统,通过访问部署在服务器上的地址(请用谷歌浏览器或微软Edge浏览器访问),输入相应的设置账号和密码即可访问边缘计算系统,在边缘计算系统里的流程管理界面可以实现控制器硬件资源配置以及流程图绘制。
- 自动化调试软件Loader,一套。本公司会在控制器上安装自动化调试软件Loader,默认会安装在控制器系统
D:\Ftp\EasyAutoSystem\Start\目录下,通过自动化调试软件Loader可以启动低代码调试助手,调试轴参数、IO参数以及低代码流程等。
主页
主页界面主要由一些按钮控件组成,如下图1所示:
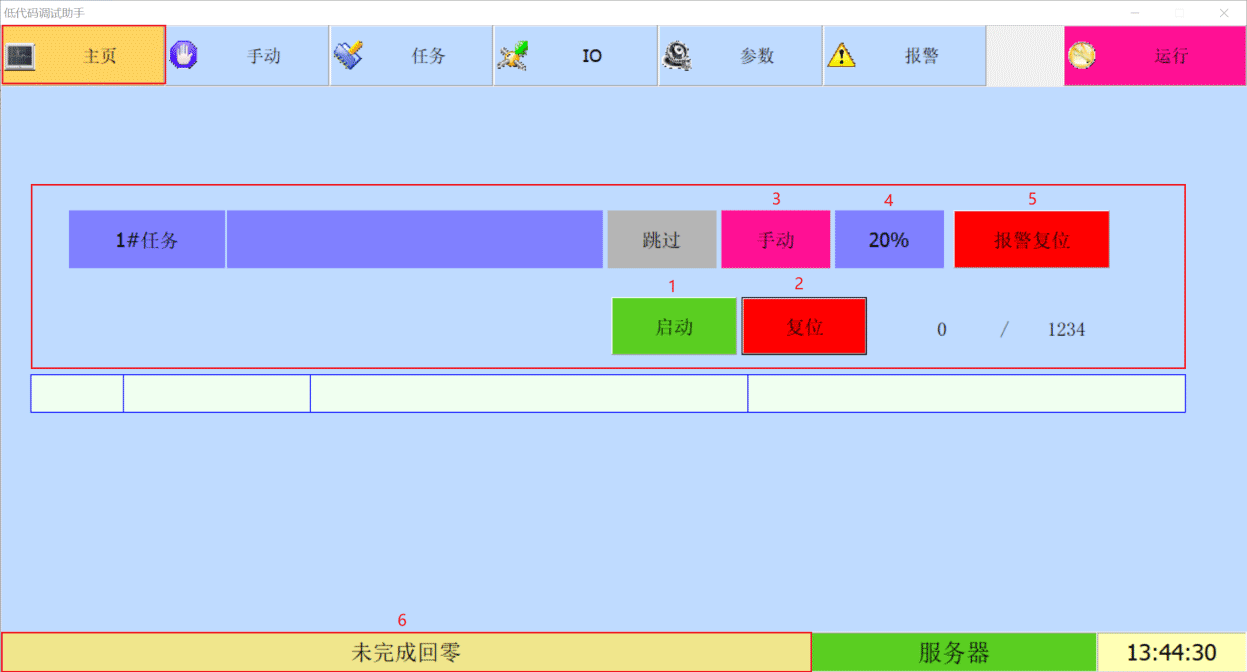
如上图1所示:
- 启动:在利用低代码调试助手调试低代码流程时,可以通过该启动按钮控制低代码流程启动运行,注意启动是同时启动所有添加到
workflow_config.txt流程执行文件里的低代码流程,而且低代码流程在运行前必须保证低代码系统是处于系统正常以及自动模式下,才可以正常启动低代码流程运行。系统正常如上图标注1,当标注6:系统当前报警信息显示未完成回零时,此时只需要在手动界面,轴模式选中全部回零,然后点击启动,等待轴全部回零完成时,系统当前报警信息会显示系统正常。自动模式单击标注3:手动按钮即可切换到自动模式。 - 复位:主要有两种功能,一是在利用低代码调试助手运行低代码流程时,需要让低代码流程从流程开始重新运行时,可以通过该复位按钮控制流程复位,注意复位是同时复位所有添加到
workflow_config.txt流程执行文件里的低代码流程,而且只会复位低代码流程,不会主动复位气缸和轴,如果需要复位气缸动作和轴运动需要通过流程实现。二是在已经打开自动化调试软件Loader的前提下,在FlowChart文件夹里替换低代码流程而不更改workflow_config.txt流程执行文件里的低代码流程内容时,可以通过点击复位按钮刷新更新的低代码流程,而不用通过退出系统Loader再重新启动系统Loader的方式更新低代码流程。注意如果更改了workflow_config.txt流程执行文件里的低代码流程内容,一定要通过退出系统Loader再重新启动系统Loader的方式才可以更新低代码流程。 - 手动:该栏位控制低代码调试助手的系统模式,有
手动和自动两种系统模式可以自由切换。手动,当低代码系统切换到手动模式时,可以在手动页面控制轴的相关运动以及在IO界面控制IO输出点打开和关闭等等相关操作,注意在手动模式下无法启动低代码流程运行。自动,当低代码系统切换到自动模式时,无法在手动页面控制轴的相关运动以及在IO界面控制IO输出点打开和关闭等等相关操作,注意在自动模式下以及低代码系统处于系统正常的前提下,可以启动低代码流程运行。 - 系统速率:此栏位为在手动页面控制轴运动时的轴速率,该栏位对应的变量ID默认是
3171,针对低代码调试助手,该变量ID3171的取值范围是0~100,单位为百分比%。如果想修改该栏位的数值,单击此栏位,输入对应的数值,点击确定即可。比如此时想把图1的20%修改为30%,如下图2所示:
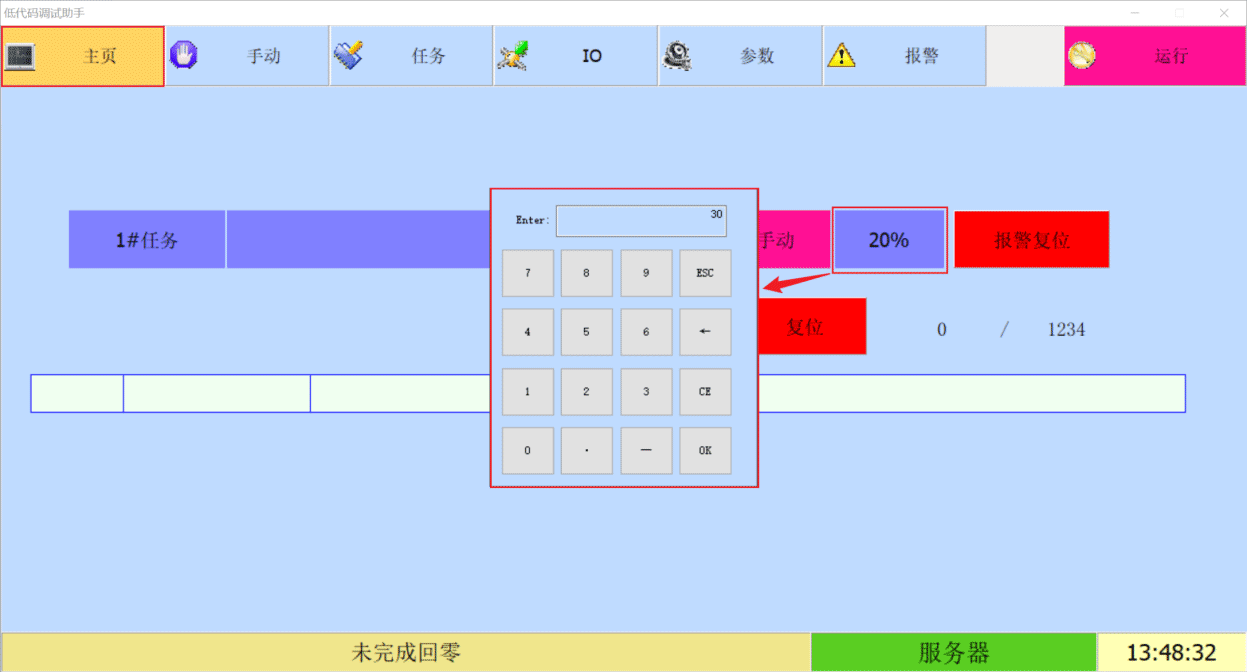
如上图2所示,当系统速率修改为30%时,30%指的是在手动页面控制轴相关运动时的最大速度的百分比为手动控制轴的运动速率。比如在利用Janus配置控制器资源轴资源的相关参数时,轴的最大速度设置为500毫米/秒,系统速率设置为30%,则手动控制轴的运动速率为500*30%=150毫米/秒。
- 报警复位:当低代码系统
标号6:系统当前报警信息显示异常报警或者显示未完成回零时,会显示报警复位按钮;当低代码系统标号6:系统当前报警信息显示系统正常时,会隐藏报警复位按钮;如果低代码系统标号6:系统当前报警信息显示异常报警,需要先解决引起低代码系统异常报警的原因,才可以通过复位按钮清除异常报警信息,使低代码系统6:系统当前报警信息显示系统正常。 - 系统当前报警信息:主要是用来显示低代码系统的状态。注意系统当前报警信息每次只能显示一条,并且是以系统最后的状态为主。
手动
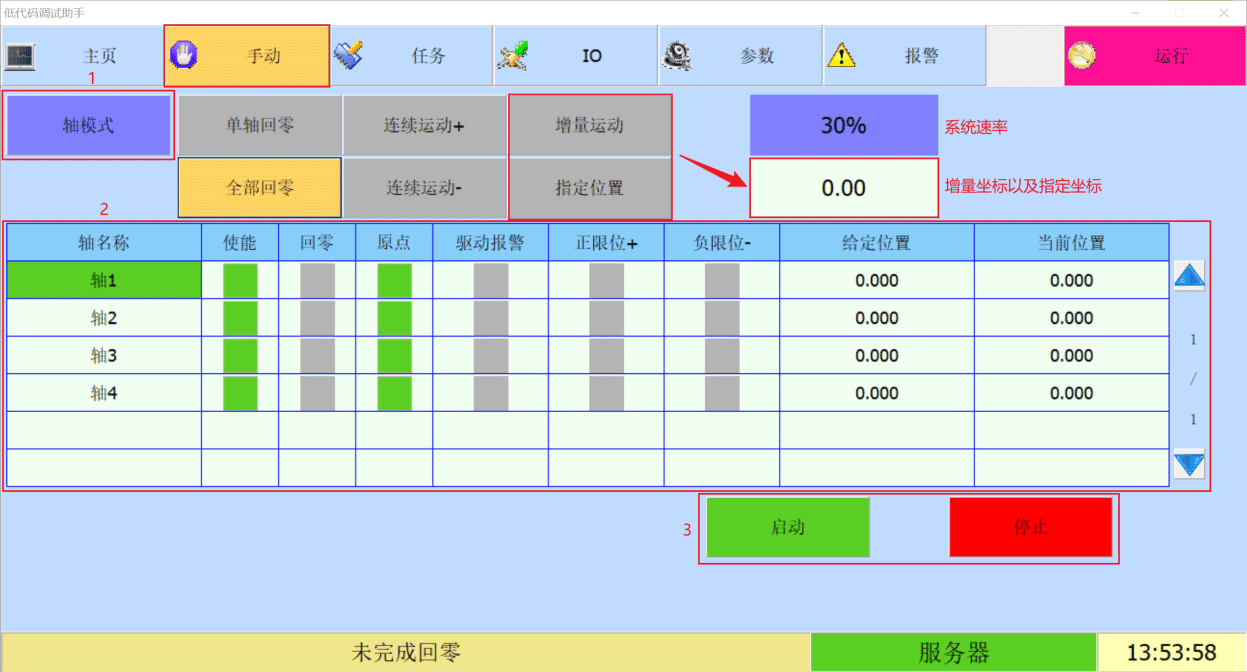
如图3所示,手动页面主要由三大部分组成,包括标号1:轴模式、标号2:轴信息、以及标号3:轴控制。
:::info 注意
除轴的上下使能操作无需同时关联轴模式、轴信息、轴控制三个模块外,若要通过运动模式控制轴运动,需先选择目标运动模式类型,然后选择对应轴号,最后启动运动指令。
:::
如上图3所示:
- 轴模式:轴模式有
单轴回零、全部回零、连续运动+、连续运动-、增量运动、指定位置六种运动模式可以选择。- 单轴回零:每次只能启动单个轴回零。
- 全部回零:可以同时启动所有轴回零。
- 连续运动+:相当于正向Jog运动。
- 连续运动-:相当于负向Jog运动。
- 增量运动:控制轴每次启动运动都以固定步长做增量运动,轴运动的是相对位置。
- 指定运动:控制轴启动运动以固定位置运动,轴运动的是绝对位置。
:::info 注意
轴增量运动的坐标以及指定位置的坐标都需要在指定的栏位输入,轴模式选中增量运动或者指定位置模式后,才可以在增量坐标以及指定坐标栏位输入坐标位置。系统速率:该栏位与图1标号4中的系统速率栏位的含义以及操作一致。
:::
- 轴信息:轴信息有轴名称、使能、回零、原点、驱动报警、正限位+、负限位-、给定位置、当前位置9种轴信息可以查看。
- 轴信息:显示的轴个数以及轴名称与Janus配置控制器资源轴资源生成的轴参数配置的名称与个数一致,可以通过修改Janus配置控制器资源轴资源来修改手动页面的轴信息。
- 轴名称:从上往下轴名称对应的轴号从1开始排序。
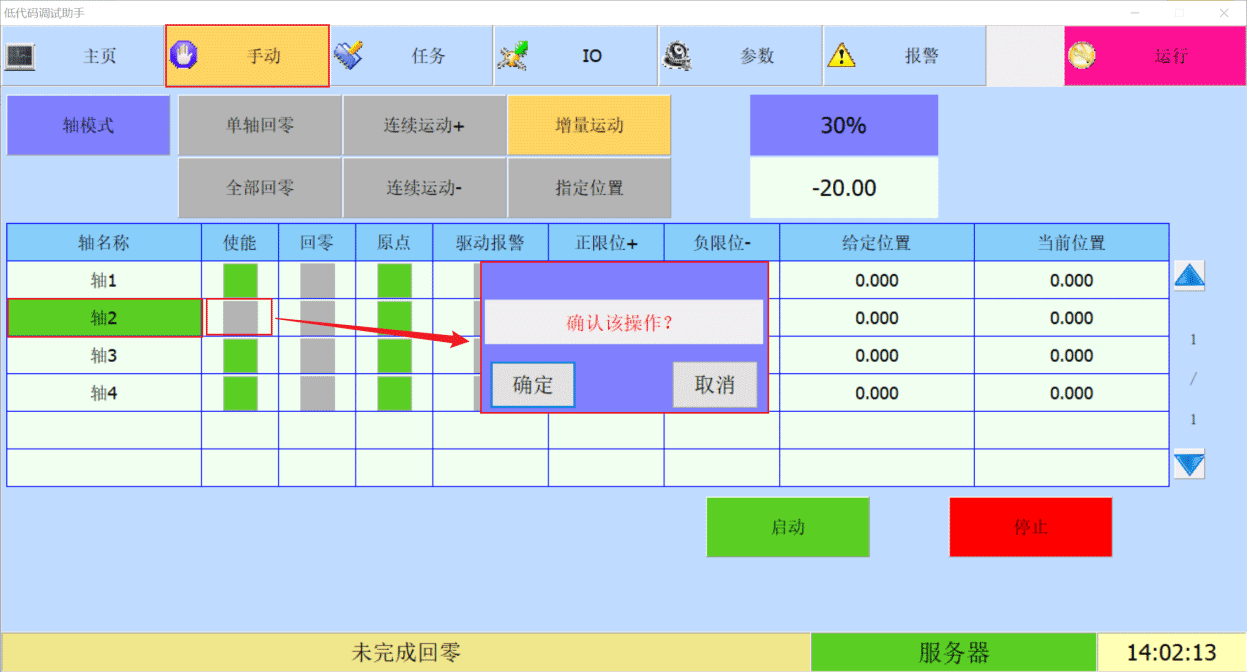
- 轴使能:轴使能操作包含上使能和下使能两种状态控制:
- 下使能操作:需先选中目标轴的轴名称(高亮显示),点击使能按钮后在弹窗
确认操作,即可切断该轴动力输出; - 上使能操作:对已下使能的轴重复相同操作(选中轴名→点击
使能按钮→确认,如下图4),可恢复轴动力供应,系统默认所有轴处于上使能状态,操作后状态指示灯会同步更新;
- 下使能操作:需先选中目标轴的轴名称(高亮显示),点击使能按钮后在弹窗
- 回零、原点、驱动报警、正限位+、负限位-:轴状态显示栏位,默认都是低电平有效;
- 给定位置:可以显示轴的规划位置;
- 当前位置:可以显示轴的编码器位置;
- 轴控制(启动、停止):轴控制包括启动和停止两个栏位。
- 启动:可以控制轴启动运动。
- 停止:可以控制轴停止运动。比如现在想控制3轴单轴回零,首先轴模式要选中单轴回零模式,深色表示已经选中单轴回零模式,然后选中轴名称轴3,单击选中轴3,绿色表示已经选中3轴,最后点击启动,即可控制3轴单轴回零,如下图5所示:

如上图5所示,如果回零完成,回零栏位的状态会显示绿色。
任务
任务界面主要可以控制低代码流程运行、监控低代码流程执行信息以及操作低代码变量等等,如下图6所示:
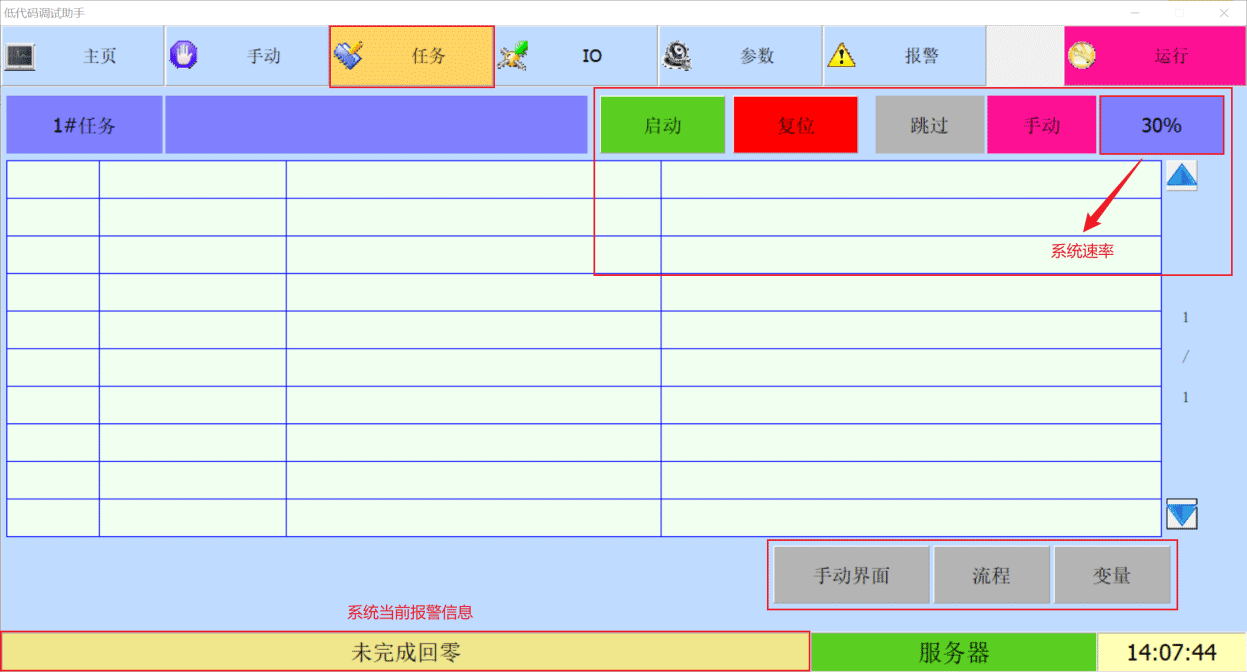
- 启动、复位、手动、系统速率:对应栏位与图1主页界面启动、复位、手动、系统速率栏位的含义以及操作一致。
- 手动界面栏位与2.3手动页面的操作一致。
- 流程:当低代码流程在
系统正常以及自动模式下,启动运行低代码流程,此时点击流程控件弹出流程界面可以监控流程的执行信息(如图6)包括:- 流程执行状态以及流程任务切换
- 流程名称信息显示
- 流程执行信息显示
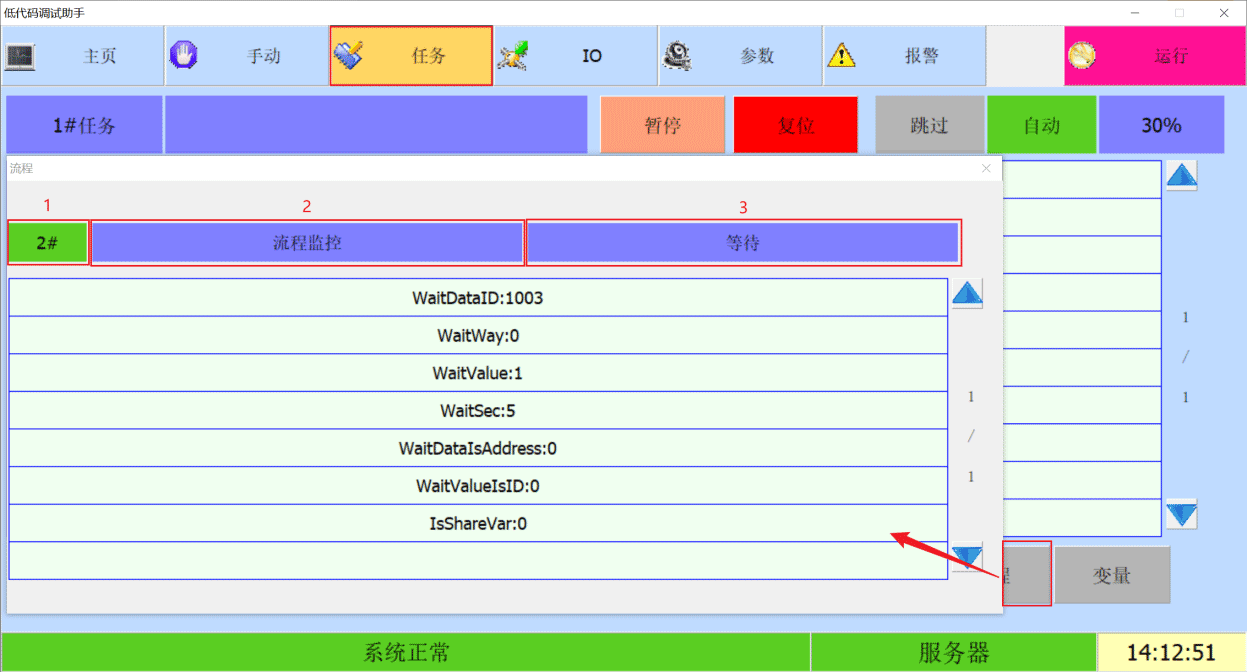
- 标号1:流程执行状态灯以及流程名称切换:
- 当低代码流程正常运行时,该栏位状态灯的颜色为绿色;
- 当低代码流程还没启动运行处于待机状态时,该栏位状态灯的颜色为蓝色;
- 当低代码流程运行过程中异常报警或者暂停时,该栏位状态灯的颜色为浅红色。
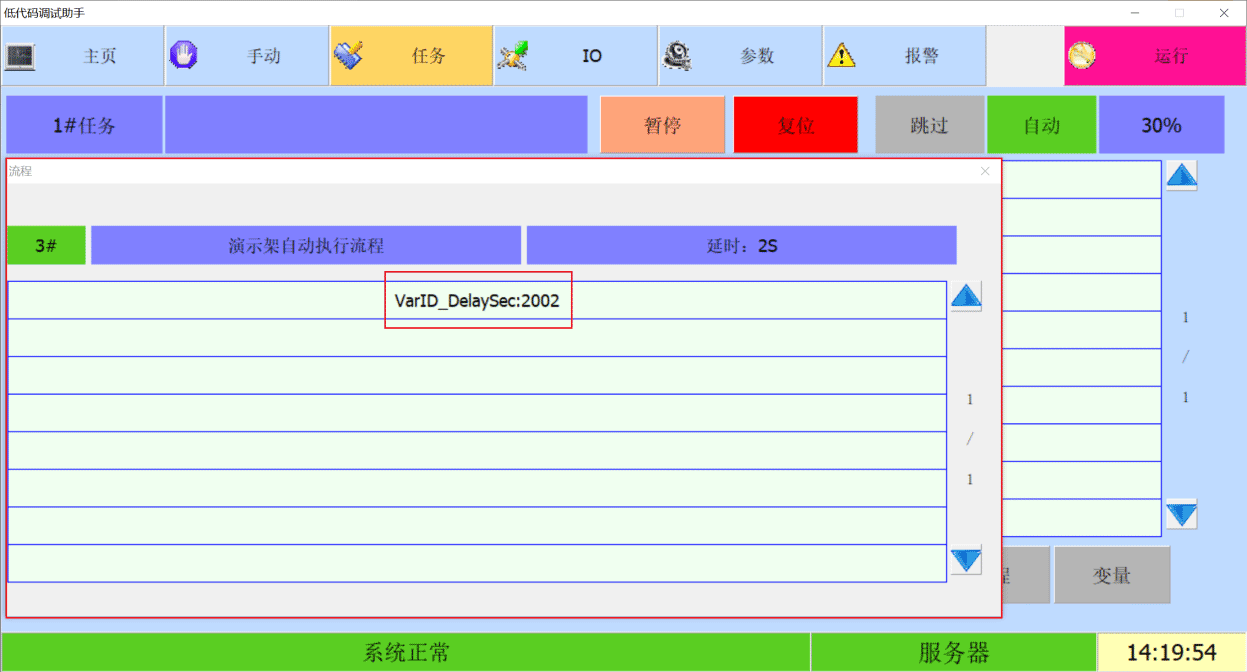
- 如果我们想监控其它的流程任务,也可以点击该栏位,在弹出的窗口输入流程名称对应的序号,然后点击确定即可切换到对应的流程名称。如图8所示,切换到3号流程名称
演示架自动执行流程。流程名称的序号与添加到work_config.txt流程执行文件里的低代码流程的名称先后顺序有关,如下图9所示:。

- 标号2:流程名称信息显示,显示监控的低代码流程名称。
- 标号3:流程执行信息显示,显示低代码流程运行过程中具体执行到哪一步,比如运行
演示架自动执行流程流程时,流程执行信息显示如下图10所示。
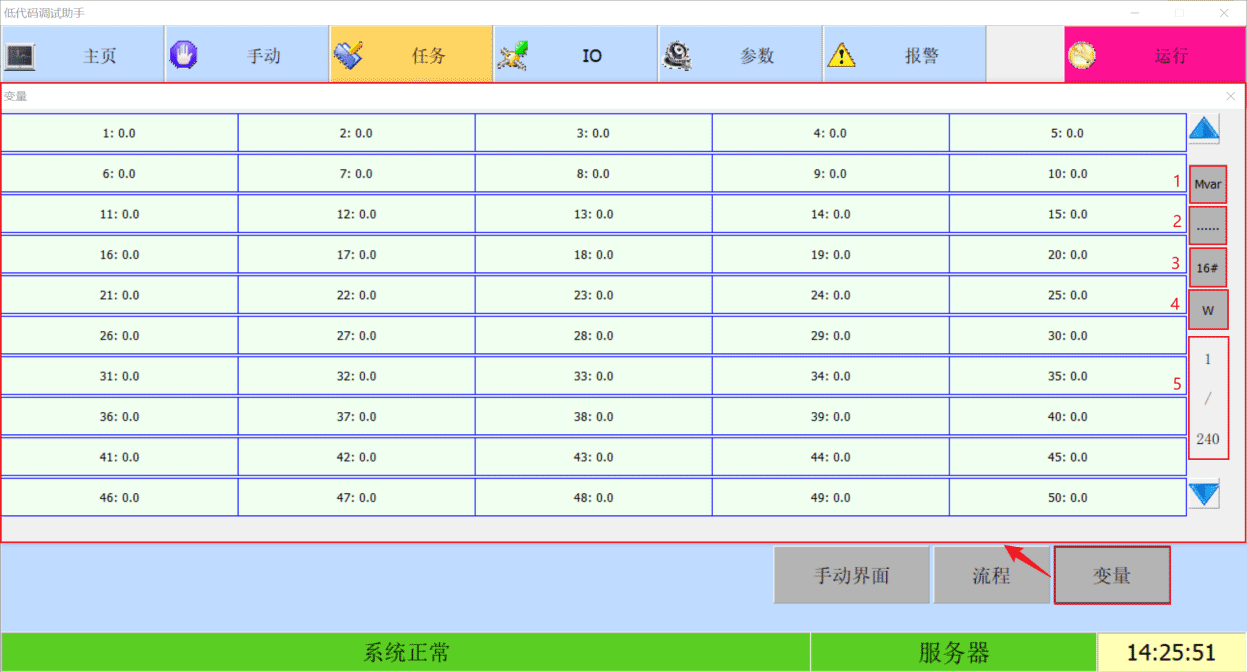
- 变量:单击变量可以弹出变量界面,方便操作低代码变量。变量主要由5部分组成,
- 1:Mvar共享变量、
- 2:......变量注释信息显示、
- 3:16#字符信息显示、
- 4:w(write)可写、
- 5:1/240变量页面切换,如下图11所示
:::info 变量区间范围 低代码变量可以分成以下五个区间范围:
- 第一个区间范围:
1~1000用于定义设备IO输入信号; - 第二个区间范围:
1001~2000用于定义设备IO输出信号; - 第三个区间范围:
2001~4000用于设备公共变量、云平台共享变量; - 第四个区间范围:
4001~10000为普通变量,可以用来定义设备IO输入输出信号或者是设备公共变量。 - 第五个区间范围:
10001+为系统信息即设备系统变量(只读详情参考系统变量表)。
变量14000以及10001+以上的变量为系统使用变量,客户在定义变量的过程中不允许自行定义此类变量的含义。而且客户在使用400110000范围内的变量来自定义变量的时候,为了方便查找变量,编写流程、配置通讯文件数据、后期维护以及后期数据移植等等,建议客户可以按数据的类型来自定义变量,比如变量40006000为short(0x)类型、60008000为float(4x)类型、8000~10000为char(4x)类型等等。
:::
如图11所示:
- 标号1:
Mvar共享变量,单击Mvar即可选中并且切换到共享变量页面,注意低代码共享变量与普通变量是两套独立的变量。Mvar共享变量一般用于客户端与客户端之间的信息交互。共享变量与普通用户变量的个数一致,共享变量映射进内存,可供所有客户机程序读写,方便客户机之间通信交互。 - 标号2:
……变量注释信息显示,用于显示变量名称注释信息,方便后期变量维护。变量注释信息主要分为两种,一种是用户变量注释信息,变量范围为19999;二是系统变量注释信息,变量范围为1000012000。用户变量注释信息对应的文件是“Note_Var.txt”配置文件,系统变量注释对应的文件是“Note_SysVar.txt”配置文件。 - 标号3:
16#字符信息显示:用来查看变量存放字符信息,如果写入变量里的值是字符,单击16#即可选中并且切换到变量字符信息显示界面。 - 标号4:
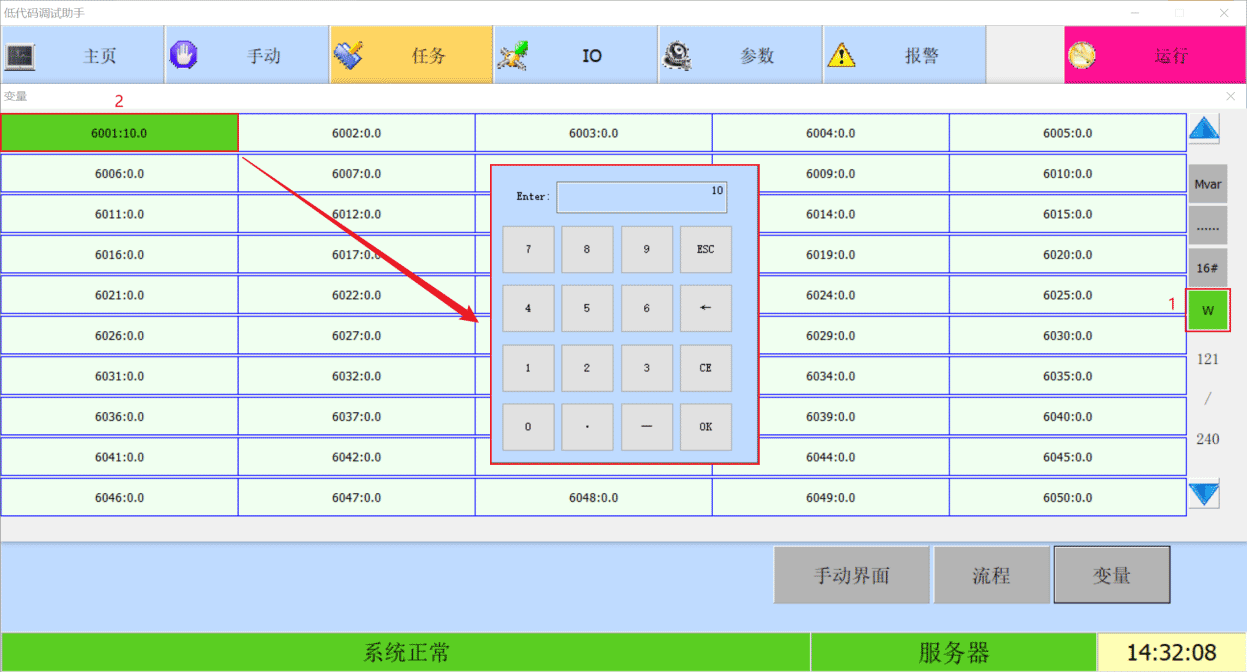
W(write)可写:变量需要写入数值时模式选择。如果想对某个变量写入数值操作时,需要先单击w即可选中变量写入数值操作模式,此时再点击选中想要写入数值的变量,在弹出的窗口输入想要写入变量的数值,再点击确定即可完成对变量写入数值操作。比如对变量ID:6001写入数值10时,如下图12所示: - 标号5:
1/240变量页面切换:一页变量的个数有50个,如果想快速切换到对应的变量,可以单击1/240,在弹出的窗口输入对应的数值(一页变量个数的倍数)然后点击确定即可快速定位到想要查找的变量的位置。
IO
IO界面主要由两大部分组成,包括1:IO输入点对应的变量ID、状态以及名称、2:IO输出点对应的变量ID、状态、名称、打开以及关闭,如下图13所示:
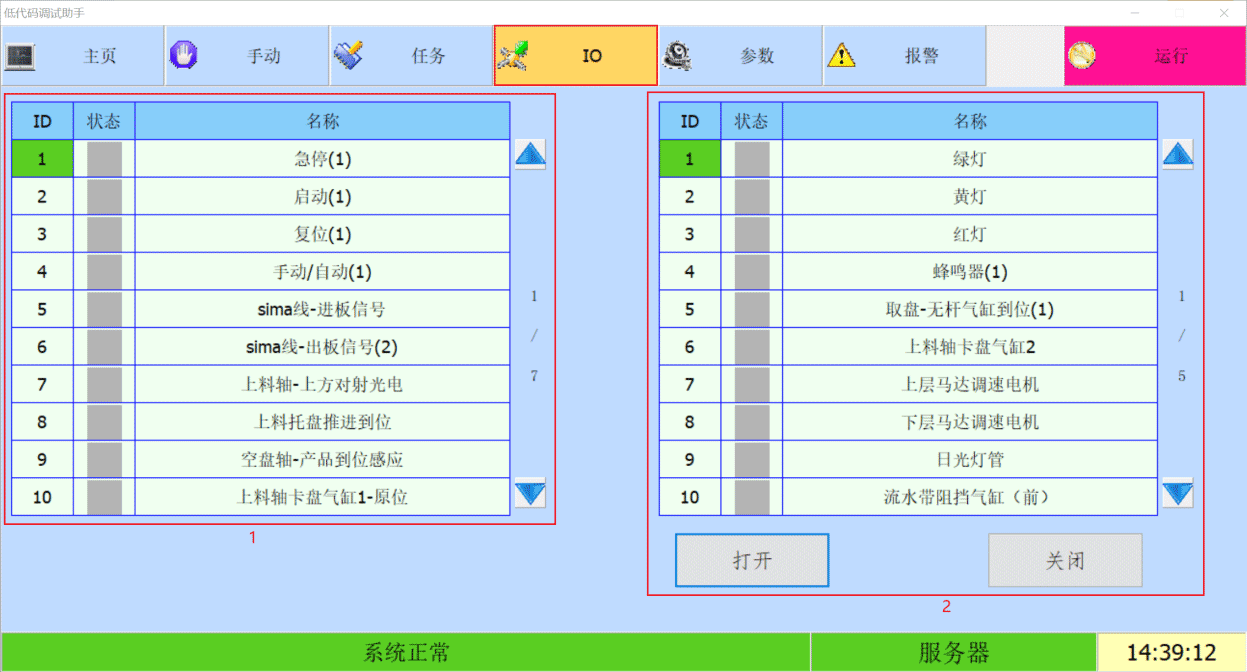
- 标号1:IO输入点对应的变量ID、状态以及名称:IO输入点只能监控其状态,不能对其进行操作。如果状态一栏是绿色的表示IO输入点有信号,灰色表示IO输入点无信号。注意:IO输入点对应的变量ID是从1开始的,所以第一个IO输入点对应的变量ID是1,后面的输入点对应的变量ID往1~1000排序。变量输入点的名称可以通过
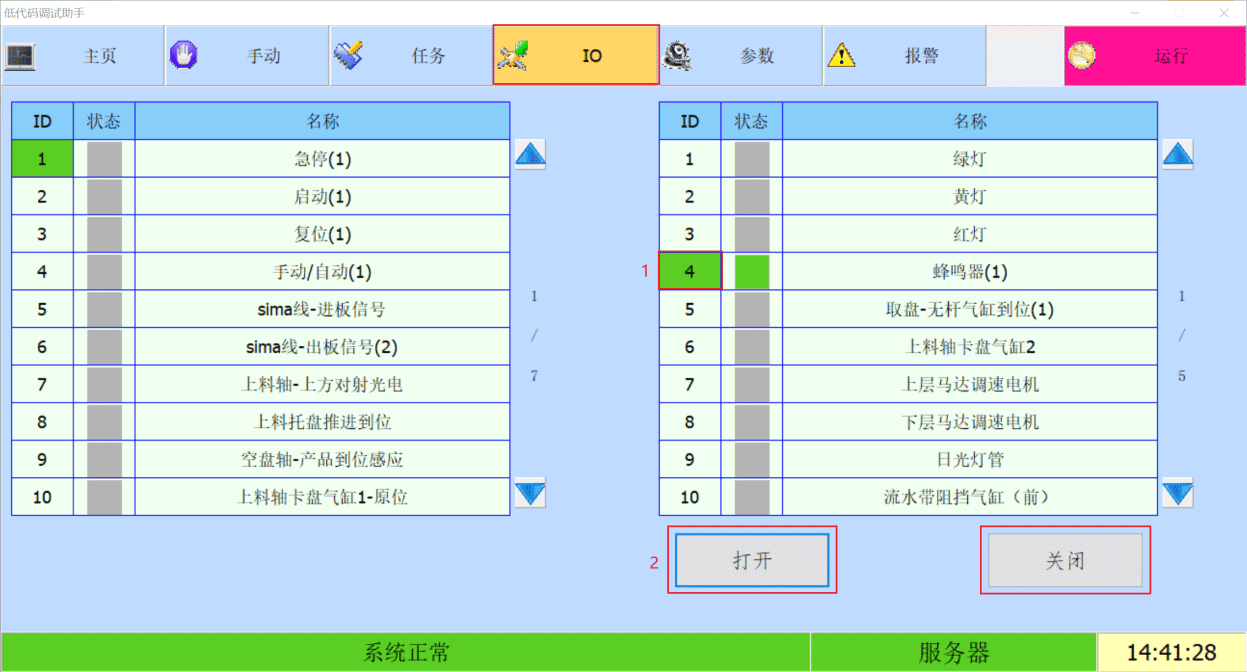
Note_IO_Input.txt输入点注释配置文件修改。 - 标号2:IO输出点对应的变量ID、状态、名称、打开以及关闭:IO输出点除了监控状态还可以对IO输出点进行输出操作,比如现在控制蜂鸣器输出,首先选中蜂鸣器,绿色表示选中,然后点击打开,即可控制蜂鸣器对应的IO点输出,如下图14所示,如果点击关闭,即可控制蜂鸣器对应的IO点输出关闭。注意:IO输出点对应的变量ID是从1001开始的,所以第一个IO输出点对应的变量ID是1001,后面的输出点对应的变量ID往1001~到2000排序。变量输出点的名称可以通过
Note_IO_Output.txt输出点注释配置文件修改。
参数
参数界面的主要功能是可以设置轴的正负软限位,但是参数界面有权限限制,一般低代码调试助手的默认权限是运行,该权限下用户点击参数界面是无效的、是无法对参数界面的内容进行操作的。如果用户想对参数界面的内容进行操作,用户可以更改低代码调试助手的权限,权限为管理时点击参数可以对参数界面的内容进行操作,如下图15所示:
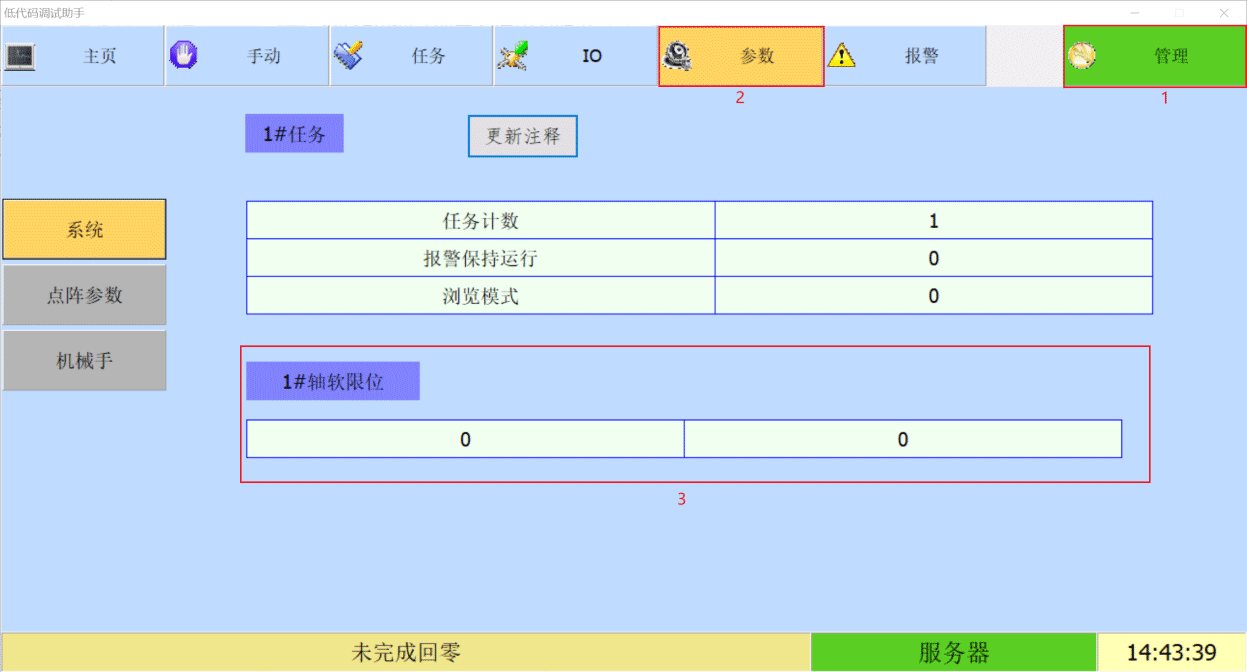
:::info 注意
轴正负软限位设置主要是针对轴没有实际的正负限位信号的时候,可以通过正负软限位来限制轴的运动行程,避免轴超出可运动的行程造成轴撞击。如果用户想设置轴的正负软限位,首先需要在配置轴参数配置文件Ctrl_Mtn_Axis.txt时,激活软限位有效,此时才能在参数界面对轴的正负软限位位置进行设置,否则在设置正负软限位值的时候输入是无效的。
:::
报警
报警界面主要由三大部分组成,包括标号1当前报警、历史报警、报警文件、2报警复位;标号3 系统当前报警信息。如下图16所示:
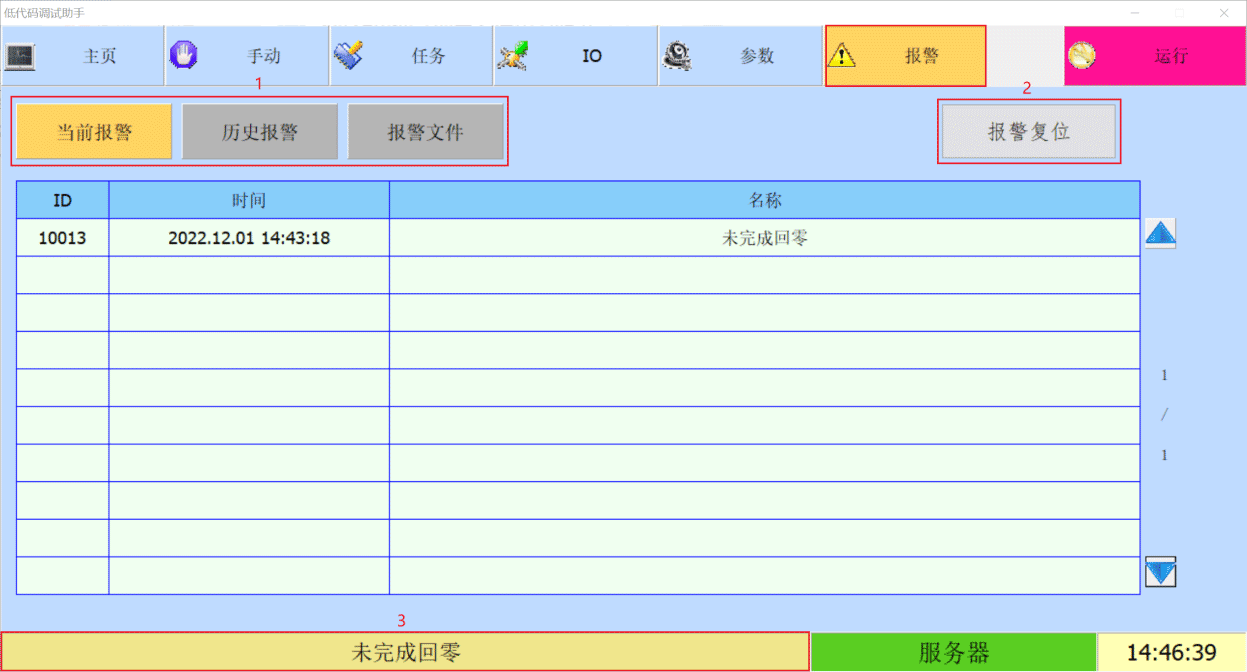
- 标号1:当前报警、历史报警、报警文件:当前报警页面可以记录低代码系统在任意时间段的当前报警信息包括报警ID、报警时间、报警名称,方便用户追溯低代码系统在任意时间段系统出现的问题。历史文件页面目前不使用。报警文件页面可以显示低代码系统每个月记录的报警信息生成的日志文件名称,报警日志文件可以在低代码系统
D:\Ftp\EasyAutoSystem\System\Alarm_Note_Files\Log目录下找到。 - 标号2:报警复位:该栏位与图1主页界面标号2:复位栏位的含义以及操作一致。
- 标号3:系统当前报警信息:该栏位与图1主页界面标号6:系统当前报警信息栏位的含义以及操作一致。